mirror of
https://github.com/huggingface/diffusers.git
synced 2026-01-27 17:22:53 +03:00
Merge branch 'main' of https://github.com/huggingface/diffusers
This commit is contained in:
28
README.md
28
README.md
@@ -30,20 +30,32 @@ More precisely, 🤗 Diffusers offers:
|
||||
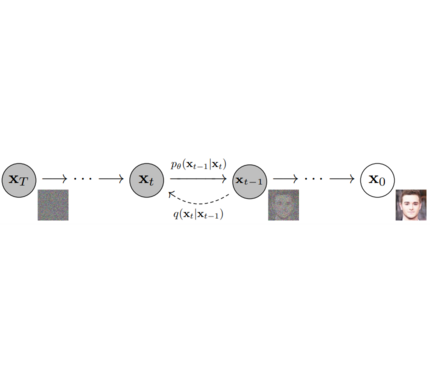
**Models**: Neural network that models $p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)$ (see image below) and is trained end-to-end to *denoise* a noisy input to an image.
|
||||
*Examples*: UNet, Conditioned UNet, 3D UNet, Transformer UNet
|
||||
|
||||
|
||||
|
||||
<p align="center">
|
||||
<img src="https://user-images.githubusercontent.com/10695622/174349667-04e9e485-793b-429a-affe-096e8199ad5b.png" width="800"/>
|
||||
<br>
|
||||
<em> Figure from DDPM paper (https://arxiv.org/abs/2006.11239). </em>
|
||||
<p>
|
||||
|
||||
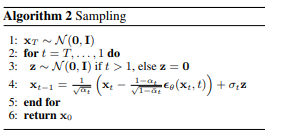
**Schedulers**: Algorithm class for both **inference** and **training**.
|
||||
The class provides functionality to compute previous image according to alpha, beta schedule as well as predict noise for training.
|
||||
*Examples*: [DDPM](https://arxiv.org/abs/2006.11239), [DDIM](https://arxiv.org/abs/2010.02502), [PNDM](https://arxiv.org/abs/2202.09778), [DEIS](https://arxiv.org/abs/2204.13902)
|
||||
|
||||
|
||||
|
||||
<p align="center">
|
||||
<img src="https://user-images.githubusercontent.com/10695622/174349706-53d58acc-a4d1-4cda-b3e8-432d9dc7ad38.png" width="800"/>
|
||||
<br>
|
||||
<em> Sampling and training algorithms. Figure from DDPM paper (https://arxiv.org/abs/2006.11239). </em>
|
||||
<p>
|
||||
|
||||
|
||||
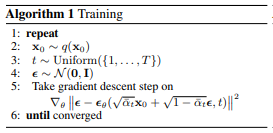
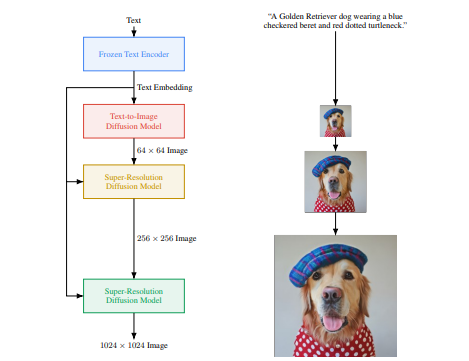
**Diffusion Pipeline**: End-to-end pipeline that includes multiple diffusion models, possible text encoders, ...
|
||||
*Examples*: GLIDE, Latent-Diffusion, Imagen, DALL-E 2
|
||||
|
||||
|
||||
|
||||
<p align="center">
|
||||
<img src="https://user-images.githubusercontent.com/10695622/174348898-481bd7c2-5457-4830-89bc-f0907756f64c.jpeg" width="550"/>
|
||||
<br>
|
||||
<em> Figure from ImageGen (https://imagen.research.google/). </em>
|
||||
<p>
|
||||
|
||||
## Philosophy
|
||||
|
||||
- Readability and clarity is prefered over highly optimized code. A strong importance is put on providing readable, intuitive and elementary code design. *E.g.*, the provided [schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers) are separated from the provided [models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models) and provide well-commented code that can be read alongside the original paper.
|
||||
@@ -173,6 +185,10 @@ image_pil = PIL.Image.fromarray(image_processed[0])
|
||||
image_pil.save("test.png")
|
||||
```
|
||||
|
||||
#### **Examples for other modalities:**
|
||||
|
||||
[Diffuser](https://diffusion-planning.github.io/) for planning in reinforcement learning: [](https://colab.research.google.com/drive/1TmBmlYeKUZSkUZoJqfBmaicVTKx6nN1R?usp=sharing)
|
||||
|
||||
### 2. `diffusers` as a collection of popular Diffusion systems (GLIDE, Dalle, ...)
|
||||
|
||||
For more examples see [pipelines](https://github.com/huggingface/diffusers/tree/main/src/diffusers/pipelines).
|
||||
|
||||
@@ -490,7 +490,7 @@ class ModelMixin(torch.nn.Module):
|
||||
raise RuntimeError(f"Error(s) in loading state_dict for {model.__class__.__name__}:\n\t{error_msg}")
|
||||
|
||||
if len(unexpected_keys) > 0:
|
||||
logger.warninging(
|
||||
logger.warning(
|
||||
f"Some weights of the model checkpoint at {pretrained_model_name_or_path} were not used when"
|
||||
f" initializing {model.__class__.__name__}: {unexpected_keys}\n- This IS expected if you are"
|
||||
f" initializing {model.__class__.__name__} from the checkpoint of a model trained on another task or"
|
||||
@@ -502,7 +502,7 @@ class ModelMixin(torch.nn.Module):
|
||||
else:
|
||||
logger.info(f"All model checkpoint weights were used when initializing {model.__class__.__name__}.\n")
|
||||
if len(missing_keys) > 0:
|
||||
logger.warninging(
|
||||
logger.warning(
|
||||
f"Some weights of {model.__class__.__name__} were not initialized from the model checkpoint at"
|
||||
f" {pretrained_model_name_or_path} and are newly initialized: {missing_keys}\nYou should probably"
|
||||
" TRAIN this model on a down-stream task to be able to use it for predictions and inference."
|
||||
@@ -521,7 +521,7 @@ class ModelMixin(torch.nn.Module):
|
||||
for key, shape1, shape2 in mismatched_keys
|
||||
]
|
||||
)
|
||||
logger.warninging(
|
||||
logger.warning(
|
||||
f"Some weights of {model.__class__.__name__} were not initialized from the model checkpoint at"
|
||||
f" {pretrained_model_name_or_path} and are newly initialized because the shapes did not"
|
||||
f" match:\n{mismatched_warning}\nYou should probably TRAIN this model on a down-stream task to be able"
|
||||
|
||||
@@ -18,6 +18,7 @@ import inspect
|
||||
import tempfile
|
||||
import unittest
|
||||
import numpy as np
|
||||
import pytest
|
||||
|
||||
import torch
|
||||
|
||||
@@ -32,6 +33,7 @@ from diffusers import (
|
||||
LatentDiffusion,
|
||||
PNDMScheduler,
|
||||
UNetModel,
|
||||
GLIDESuperResUNetModel
|
||||
)
|
||||
from diffusers.configuration_utils import ConfigMixin
|
||||
from diffusers.pipeline_utils import DiffusionPipeline
|
||||
@@ -94,7 +96,7 @@ class ModelTesterMixin:
|
||||
|
||||
with tempfile.TemporaryDirectory() as tmpdirname:
|
||||
model.save_pretrained(tmpdirname)
|
||||
new_model = UNetModel.from_pretrained(tmpdirname)
|
||||
new_model = self.model_class.from_pretrained(tmpdirname)
|
||||
new_model.to(torch_device)
|
||||
|
||||
with torch.no_grad():
|
||||
@@ -178,7 +180,7 @@ class ModelTesterMixin:
|
||||
model.to(torch_device)
|
||||
model.train()
|
||||
output = model(**inputs_dict)
|
||||
noise = torch.randn(inputs_dict["x"].shape).to(torch_device)
|
||||
noise = torch.randn((inputs_dict["x"].shape[0], ) + self.get_output_shape).to(torch_device)
|
||||
loss = torch.nn.functional.mse_loss(output, noise)
|
||||
loss.backward()
|
||||
|
||||
@@ -196,6 +198,14 @@ class UnetModelTests(ModelTesterMixin, unittest.TestCase):
|
||||
time_step = torch.tensor([10]).to(torch_device)
|
||||
|
||||
return {"x": noise, "timesteps": time_step}
|
||||
|
||||
@property
|
||||
def get_input_shape(self):
|
||||
return (3, 32, 32)
|
||||
|
||||
@property
|
||||
def get_output_shape(self):
|
||||
return (3, 32, 32)
|
||||
|
||||
def prepare_init_args_and_inputs_for_common(self):
|
||||
init_dict = {
|
||||
@@ -227,7 +237,6 @@ class UnetModelTests(ModelTesterMixin, unittest.TestCase):
|
||||
torch.cuda.manual_seed_all(0)
|
||||
|
||||
noise = torch.randn(1, model.config.in_channels, model.config.resolution, model.config.resolution)
|
||||
print(noise.shape)
|
||||
time_step = torch.tensor([10])
|
||||
|
||||
with torch.no_grad():
|
||||
@@ -240,6 +249,98 @@ class UnetModelTests(ModelTesterMixin, unittest.TestCase):
|
||||
print(output_slice)
|
||||
self.assertTrue(torch.allclose(output_slice, expected_output_slice, atol=1e-3))
|
||||
|
||||
class GLIDESuperResUNetTests(ModelTesterMixin, unittest.TestCase):
|
||||
model_class = GLIDESuperResUNetModel
|
||||
|
||||
@property
|
||||
def dummy_input(self):
|
||||
batch_size = 4
|
||||
num_channels = 6
|
||||
sizes = (32, 32)
|
||||
low_res_size = (4, 4)
|
||||
|
||||
torch_device = "cpu"
|
||||
|
||||
noise = torch.randn((batch_size, num_channels // 2) + sizes).to(torch_device)
|
||||
low_res = torch.randn((batch_size, 3) + low_res_size).to(torch_device)
|
||||
time_step = torch.tensor([10] * noise.shape[0], device=torch_device)
|
||||
|
||||
return {"x": noise, "timesteps": time_step, "low_res": low_res}
|
||||
|
||||
@property
|
||||
def get_input_shape(self):
|
||||
return (3, 32, 32)
|
||||
|
||||
@property
|
||||
def get_output_shape(self):
|
||||
return (6, 32, 32)
|
||||
|
||||
def prepare_init_args_and_inputs_for_common(self):
|
||||
init_dict = {
|
||||
"attention_resolutions": (2,),
|
||||
"channel_mult": (1,2),
|
||||
"in_channels": 6,
|
||||
"out_channels": 6,
|
||||
"model_channels": 32,
|
||||
"num_head_channels": 8,
|
||||
"num_heads_upsample": 1,
|
||||
"num_res_blocks": 2,
|
||||
"resblock_updown": True,
|
||||
"resolution": 32,
|
||||
"use_scale_shift_norm": True
|
||||
}
|
||||
inputs_dict = self.dummy_input
|
||||
return init_dict, inputs_dict
|
||||
|
||||
def test_output(self):
|
||||
init_dict, inputs_dict = self.prepare_init_args_and_inputs_for_common()
|
||||
model = self.model_class(**init_dict)
|
||||
model.to(torch_device)
|
||||
model.eval()
|
||||
|
||||
with torch.no_grad():
|
||||
output = model(**inputs_dict)
|
||||
|
||||
output, _ = torch.split(output, 3, dim=1)
|
||||
|
||||
self.assertIsNotNone(output)
|
||||
expected_shape = inputs_dict["x"].shape
|
||||
self.assertEqual(output.shape, expected_shape, "Input and output shapes do not match")
|
||||
|
||||
def test_from_pretrained_hub(self):
|
||||
model, loading_info = GLIDESuperResUNetModel.from_pretrained("fusing/glide-super-res-dummy", output_loading_info=True)
|
||||
self.assertIsNotNone(model)
|
||||
self.assertEqual(len(loading_info["missing_keys"]), 0)
|
||||
|
||||
model.to(torch_device)
|
||||
image = model(**self.dummy_input)
|
||||
|
||||
assert image is not None, "Make sure output is not None"
|
||||
|
||||
# TODO (patil-suraj): Check why GLIDESuperResUNetModel always outputs zero
|
||||
@unittest.skip("GLIDESuperResUNetModel always outputs zero")
|
||||
def test_output_pretrained(self):
|
||||
model = GLIDESuperResUNetModel.from_pretrained("fusing/glide-super-res-dummy")
|
||||
model.eval()
|
||||
|
||||
torch.manual_seed(0)
|
||||
if torch.cuda.is_available():
|
||||
torch.cuda.manual_seed_all(0)
|
||||
|
||||
noise = torch.randn(1, 3, 32, 32)
|
||||
low_res = torch.randn(1, 3, 4, 4)
|
||||
time_step = torch.tensor([42] * noise.shape[0])
|
||||
|
||||
with torch.no_grad():
|
||||
output = model(noise, time_step, low_res)
|
||||
|
||||
output, _ = torch.split(output, 3, dim=1)
|
||||
output_slice = output[0, -1, -3:, -3:].flatten()
|
||||
# fmt: off
|
||||
expected_output_slice = torch.tensor([ 0.2891, -0.1899, 0.2595, -0.6214, 0.0968, -0.2622, 0.4688, 0.1311, 0.0053])
|
||||
# fmt: on
|
||||
print(output_slice)
|
||||
self.assertTrue(torch.allclose(output_slice, expected_output_slice, atol=1e-3))
|
||||
|
||||
|
||||
class PipelineTesterMixin(unittest.TestCase):
|
||||
|
||||
Reference in New Issue
Block a user