Diffusers
Definitions
Models: Single neural network that models p_θ(x_t-1|x_t) and is trained to “denoise” to image Examples: UNet, Conditioned UNet, 3D UNet, Transformer UNet
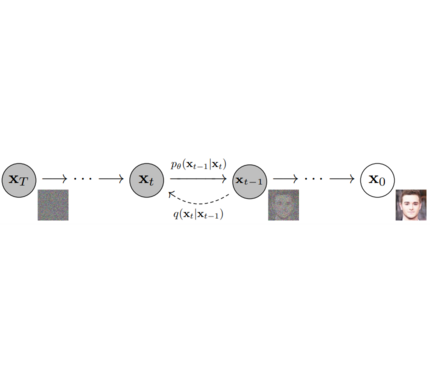
Schedulers: Algorithm to sample noise schedule for both training and inference. Defines alpha and beta schedule, timesteps, etc.. Example: Gaussian DDPM, DDIM, PMLS, DEIN
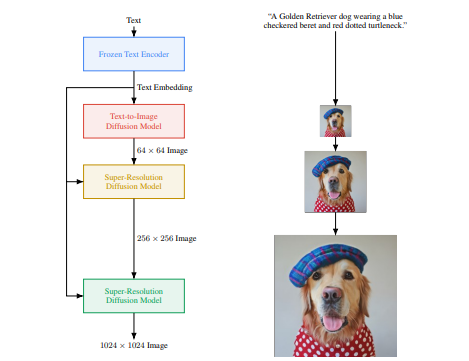
Diffusion Pipeline: End-to-end pipeline that includes multiple diffusion models, possible text encoders, CLIP Example: GLIDE,CompVis/Latent-Diffusion, Imagen, DALL-E
1. diffusers as a central modular diffusion and sampler library
diffusers is more modularized than transformers. The idea is that researchers and engineers can use only parts of the library easily for the own use cases.
It could become a central place for all kinds of models, schedulers, training utils and processors that one can mix and match for one's own use case.
Both models and scredulers should be load- and saveable from the Hub.
Example:
import torch
from diffusers import UNetModel, GaussianDDPMScheduler
import PIL
import numpy as np
generator = torch.Generator()
generator = generator.manual_seed(6694729458485568)
torch_device = "cuda" if torch.cuda.is_available() else "cpu"
# 1. Load models
scheduler = GaussianDDPMScheduler.from_config("fusing/ddpm-lsun-church")
model = UNetModel.from_pretrained("fusing/ddpm-lsun-church").to(torch_device)
# 2. Sample gaussian noise
image = scheduler.sample_noise((1, model.in_channels, model.resolution, model.resolution), device=torch_device, generator=generator)
# 3. Denoise
for t in reversed(range(len(scheduler))):
# 1. predict noise residual
with torch.no_grad():
pred_noise_t = self.unet(image, t)
# 2. compute alphas, betas
alpha_prod_t = scheduler.get_alpha_prod(t)
alpha_prod_t_prev = scheduler.get_alpha_prod(t - 1)
beta_prod_t = 1 - alpha_prod_t
beta_prod_t_prev = 1 - alpha_prod_t_prev
# 3. compute predicted image from residual
# First: compute predicted original image from predicted noise also called
# "predicted x_0" of formula (15) from https://arxiv.org/pdf/2006.11239.pdf
pred_original_image = (image - beta_prod_t.sqrt() * pred_noise_t) / alpha_prod_t.sqrt()
# Second: Clip "predicted x_0"
pred_original_image = torch.clamp(pred_original_image, -1, 1)
# Third: Compute coefficients for pred_original_image x_0 and current image x_t
# See formula (7) from https://arxiv.org/pdf/2006.11239.pdf
pred_original_image_coeff = (alpha_prod_t_prev.sqrt() * scheduler.get_beta(t)) / beta_prod_t
current_image_coeff = scheduler.get_alpha(t).sqrt() * beta_prod_t_prev / beta_prod_t
# Fourth: Compute predicted previous image µ_t
# See formula (7) from https://arxiv.org/pdf/2006.11239.pdf
pred_prev_image = pred_original_image_coeff * pred_original_image + current_image_coeff * image
# 5. For t > 0, compute predicted variance βt (see formala (6) and (7) from https://arxiv.org/pdf/2006.11239.pdf)
# and sample from it to get previous image
# x_{t-1} ~ N(pred_prev_image, variance) == add variane to pred_image
if t > 0:
variance = (1 - alpha_prod_t_prev) / (1 - alpha_prod_t) * self.noise_scheduler.get_beta(t).sqrt()
noise = scheduler.sample_noise(image.shape, device=image.device, generator=generator)
prev_image = pred_prev_image + variance * noise
else:
prev_image = pred_prev_image
# 6. Set current image to prev_image: x_t -> x_t-1
image = prev_image
# process image to PIL
image_processed = image.cpu().permute(0, 2, 3, 1)
image_processed = (image_processed + 1.0) * 127.5
image_processed = image_processed.numpy().astype(np.uint8)
image_pil = PIL.Image.fromarray(image_processed[0])
# save image
image_pil.save("test.png")
2. diffusers as a collection of most important Diffusion systems (GLIDE, Dalle, ...)
models directory in repository hosts the complete code necessary for running a diffusion system as well as to train it. A DiffusionPipeline class allows to easily run the diffusion model in inference:
Example:
from diffusers import DiffusionPipeline
import PIL.Image
import numpy as np
# load model and scheduler
ddpm = DiffusionPipeline.from_pretrained("fusing/ddpm-lsun-bedroom")
# run pipeline in inference (sample random noise and denoise)
image = ddpm()
# process image to PIL
image_processed = image.cpu().permute(0, 2, 3, 1)
image_processed = (image_processed + 1.0) * 127.5
image_processed = image_processed.numpy().astype(np.uint8)
image_pil = PIL.Image.fromarray(image_processed[0])
# save image
image_pil.save("test.png")
Library structure:
├── models
│ ├── audio
│ │ └── fastdiff
│ │ ├── modeling_fastdiff.py
│ │ ├── README.md
│ │ └── run_fastdiff.py
│ ├── __init__.py
│ └── vision
│ ├── dalle2
│ │ ├── modeling_dalle2.py
│ │ ├── README.md
│ │ └── run_dalle2.py
│ ├── ddpm
│ │ ├── example.py
│ │ ├── modeling_ddpm.py
│ │ ├── README.md
│ │ └── run_ddpm.py
│ ├── glide
│ │ ├── modeling_glide.py
│ │ ├── modeling_vqvae.py.py
│ │ ├── README.md
│ │ └── run_glide.py
│ ├── imagen
│ │ ├── modeling_dalle2.py
│ │ ├── README.md
│ │ └── run_dalle2.py
│ ├── __init__.py
│ └── latent_diffusion
│ ├── modeling_latent_diffusion.py
│ ├── README.md
│ └── run_latent_diffusion.py
├── pyproject.toml
├── README.md
├── setup.cfg
├── setup.py
├── src
│ └── diffusers
│ ├── configuration_utils.py
│ ├── __init__.py
│ ├── modeling_utils.py
│ ├── models
│ │ ├── __init__.py
│ │ ├── unet_glide.py
│ │ └── unet.py
│ ├── pipeline_utils.py
│ └── schedulers
│ ├── gaussian_ddpm.py
│ ├── __init__.py
├── tests
│ └── test_modeling_utils.py